주요안내




HOME > RESEARCH > Research project > Unmanned Agricultural Machines
Title: Path Planning·Tracking and Task Mapping Technologies for Unmaned Agricultural Operations
Period: 2014~2019
Contents:
- Development of an operational path generation algorithm for autonomous tractor in a polygonal field
- Development of a slip-compensated path tracking algorithm to navigate accurately the generated path in agricultural soil condition
- Development of a GPS error compensation algorithm using sensor fusion method for autonomous tractor

Title: Agricultural Robotics and Automation Research Center
Period: 2014~2017
Contents:
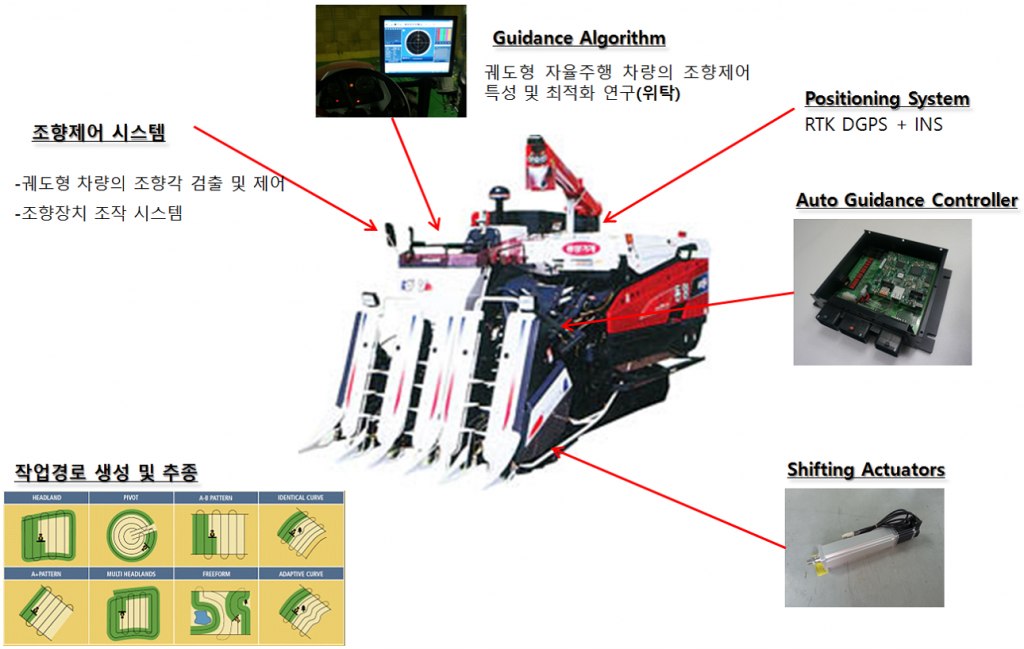
- Identification and modeling of a steering system of the tracked vehicle based on brake and clutch mechanism
- Development of an operational path generation and tracking algorithm for autonomous combine harvester in Korean paddy field
Title: Development of intelligent operation control system for autonomous tractor
Period: 2011~2013
Contents:
- Development of an autonomous tractor system that could navigate the pre-defined path and recognize the conditions of the surrounding for determining the tasks itself
- Development of a steering system and control technology for autonomous tractor
- Development of an optimal path generation algorithm for various agricultural operation

Title: Commercialization of autonomous tractor R&D Project
Period: 2018~2021
Contents:
- Optimization of the developed path planning-tracking system under Korean agricultural field conditions such as infield headland turning and slope slip compensation
- Development of a high-level controller for autonomous tractor based on ISO CAN Standard
